Uso de la Inteligencia Artificial para Incrementar la Autonomía de un Robot Móvil Mindstorms NXT en Tareas de Clasificación de Patrones
DOI:
https://doi.org/10.33017/RevECIPeru2018.0008/Keywords:
artificial intelligence, artificial vision, artificial neural networks, pattern classification, optical sensors, ultrasound sensors, microbotsAbstract
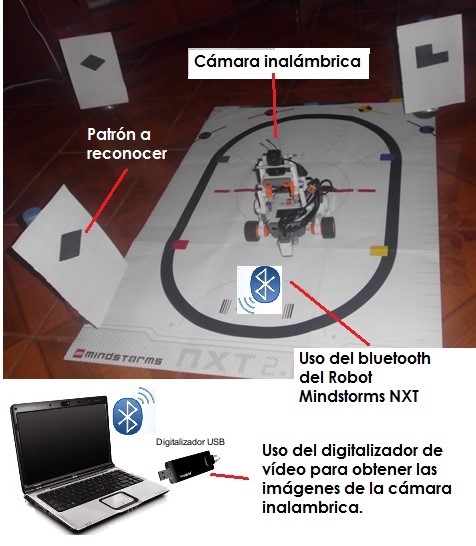
Artificial intelligence is an area that tries to equip the machines with intelligence and among the topics developed are expert systems, fuzzy logic, planning systems, search algorithms, evolutionary computation, artificial neural networks among others. The topics of artificial intelligence used in this article are artificial vision and artificial neural networks; also uses the microbot or mobile robot Mindstorms NXT, which has a limited capacity in the processing, as well as in the storage of information. The limitation of the mobile robot is because it does not have a powerful computer on board to process artificial vision algorithms and artificial neural networks; so an external computer is used to perform its control through bluetooth technology. The processing of artificial vision algorithms and artificial neural networks is done on the external computer and the actions performed by the mobile robot are sent to it, through bluetooth communication. The article considers that there is autonomy in a mobile robot, when it performs its actions without human intervention and the indicators selected to measure this autonomy are the autonomous localization of the patterns to be recognized and the autonomous recognition or classification of these patterns. The implementation of the autonomous localization of the patterns to be recognized uses optical sensors, ultrasonic sensors and the C # programming language; as well as the autonomous recognition of patterns uses a wireless camera located in the mobile robot, artificial vision algorithms, artificial neural networks and the visual basic .NET programming language. The results show that the average of the indicator percentage of patterns correctly located in the environment by the Mindstorms NXT mobile robot is 37.81% when artificial intelligence is not used and it is 97.18% when artificial intelligence is used. In addition, the average of the indicator percentage of patterns correctly recognized in the environment by the Mindstorms NXT mobile robot is 46.25% when artificial intelligence is not used and is 96.87% when using artificial intelligence.