Uso de la Inteligencia Artificial para Incrementar la Autonomía de un Robot Móvil Mindstorms NXT en Tareas de Clasificación de Patrones
DOI:
https://doi.org/10.33017/RevECIPeru2018.0008/Palabras clave:
inteligencia artificial, visión artificia, redes neuronales, clasificación de patrones, sensores ópticos, sensores de ultrasonido, microbots, Mindstorms NXTResumen
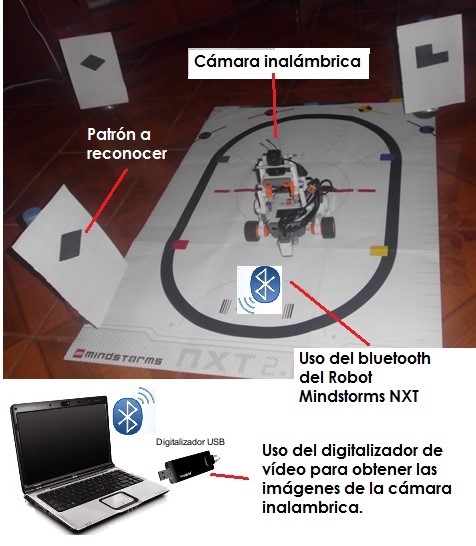
La inteligencia artificial es un área que intenta dotar de inteligencia a las máquinas y entre los tópicos que desarrolla están los sistemas expertos, la lógica difusa, los sistemas de planificación, los algoritmos de búsqueda, la computación evolutiva, redes neuronales artificiales entre otros. Los tópicos de la inteligencia artificial que utiliza este artículo son la visión artificial y las redes neuronales artificiales; además utiliza el microbot o robot móvil Mindstorms NXT, que tiene una capacidad limitada en el procesamiento, así como en el almacenamiento de información. La limitación del robot móvil se da porque no tiene a bordo un computador potente para procesar los algoritmos de visión artificial y de las redes neuronales artificiales; por lo que se utiliza un computador externo para realizar su control a través de la tecnología bluetooth. El procesamiento de los algoritmos de visión artificial y de redes neuronales artificiales se realiza en el computador externo y las acciones que ejecuta el robot móvil son enviadas a este, a través de la comunicación bluetooth. El artículo considera que existe autonomía en un robot móvil, cuando este realiza sus acciones sin intervención humana y los indicadores seleccionados para medir esta autonomía son la localización autónoma de los patrones a reconocer y el reconocimiento autónomo o clasificación de estos patrones. La implementación de la localización autónoma de los patrones a reconocer utiliza sensores ópticos, sensores ultrasónicos y el lenguaje de programación C#; así como el reconocimiento autónomo de patrones utiliza una cámara inalámbrica ubicada en el robot móvil, algoritmos de visión artificial, redes neuronales artificiales y el lenguaje de programación visual basic .NET. Los resultados muestran que el promedio del indicador porcentaje de patrones localizados en forma correcta en el entorno por el robot móvil Mindstorms NXT es de 37.81% cuando no se usa la inteligencia artificial y es de 97.18% cuando se usa la inteligencia artificial. Además, el promedio del indicador porcentaje de patrones reconocidos en forma correcta en el entorno por el robot móvil Mindstorms NXT es de 46.25% cuando no se usa la inteligencia artificial y es de 96.87% cuando se usa la inteligencia artificial.